Ach halt doch die Klappe.
Jetzt stellt man sich so eine Heckklappe ja eigentlich als recht einfache Sache vor. Ein Teil, zwei Scharniere – heidewitzka, Herr Kapitän.
Nö. Erstens ist es ein chinesisches 3D-Druck-Teil. Zweitens passt es nicht eben perfekt (inwiefern da kausale Zusammenhänge bestehen sei dahingestellt, immerhin würde auch ein kanadisches Resinteil – sofern identisch – nur so lala passen).
Und dann soll es auch noch auf- und zugehen. Sicher geschlossen sein, damit die STEPPKE nicht im Galopp verloren geht. Und weit genug offen, dass sie sauber rausrutschen kann. Dazwischen ist interessanterweise nur ein Weg von um die 5 cm.
Auch hier kann ich auf ingeniöse Zuarbeit aus dem Allgäu zurückgreifen. Inklusive einer Änderung meiner eher hemdsärmeligen Scharnieranschlagepunkte am Rumpfboden, denn nun sorgt eine intelligent konstruierte Zwischenlage für den notwendigen Abstand und dient gleichzeitig der verdeckten und kinematisch korrekten Befestigung der Scharniere.
Das ist eine feine Sache, aber mein Schiff unterscheidet sich ansonsten jetzt schon ziemlich von dem meines Seenotkreuzerbaukollegen, sodass die für die Klappe vorgesehenen Betätigungsseile bei mir deutlich weiter reichen werden wie bei ihrem Erfinder. Auch habe ich die Schächte einen Hauch zu hoch einkonstruiert.
Nicht so schlimm, die Betätigungsstangen werden ein bißchen höher angeschlagen als vorgesehen. Und bekommen dann doch noch 3D-gedruckte Führungen… aber jetzt läuft die Klappe schön sau…

Mäßig. Eher mäßig.
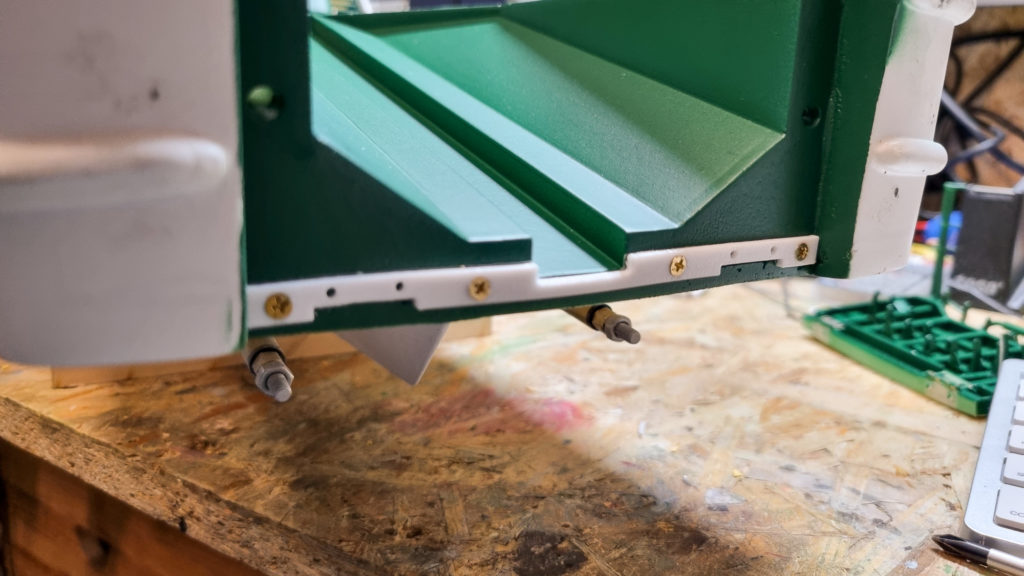
Aus irgendeinem Grund baut sich im besten Wortsinne “kurz vor Schluss” eine Art federnder Widerstand auf, der die Klappe am sanften Schließen wirkungsvoll hindert und den ich auf die Führung der Stäbe in den Schächten zurückführe. Fälschlich, wie sich zeigt. Denn nach allerlei Nacharbeiten der Schächte und genauester Kontrolle aller Laufwege zeigt sich: Es sind die leicht überstehenden Ränder der Köpfe der Scharnierschrauben, die im letzten Moment mit einer Querstrebe kollidieren. Einmal kurz den Dremel geschwungen, einen Hauch Material an den bewussten Stellen abgetragen und die Sache ist erledigt.

Für die Züge habe ich Hüllen in Form passender ABS-Röhrchen besorgt, da bei der Länge der Seile ansonsten die Kraft in Seilbeulen verpuffen würde. Dadurch kann ich die Seile in sanftem Schwung bis fast zum Bug führen, wo sich ein ganz guter Platz für ein Miniservo mit entsprechender Mechanik gefunden hat. Mini deswegen, weil der Kahn eh schon kopflastig ist und jedes unnötige Gramm Gewicht in der vorderen Schiffshälfte zu vermeiden ist. Und genug Platz für ein ausgewachsenes Robotik-Servo ist auch nicht unbedingt.

Leider tut sich das erste – zugegebenermaßen günstig gekaufte – Miniservo etwas schwer und quittiert am Ende nach etlichen Betätigungen im Rahmen des Einstellens der Klappe komplett den Dienst. Also eigentlich raucht es klassisch ab. Metallgetriebe hin oder her.
Am Ende bekomme ich die Sache aber in Griff, indem ich Federn vor die Anschläge der Kabel einfüge und einfach ein zwar dreimal so teures, aber mehr als doppelt so starkes Markenservo benutze, das zusätzlich zum Metallgetriebe auch noch Kugellager hat und nun die Klappe völlig entspannt betätigt. Schließlich drucke ich den ganzen Aufbau nochmal neu, an dieses Servo angepasst und mit deutlich weniger Schrauben (nicht im Bild…).
Man muss allerdings auch dazu sagen, dass 30 Klappvorgänge in wenigen Minuten auch ein heftiger Stresstest sind, dürfte doch die Anzahl der Betätigungen pro Fahrt später eher bei 2-4 liegen, innerhalb von einer Stunde.

Jetzt muss das Ganze noch mit dem Beiermodul verheiratet werden und die Endpunkte sauber festgelegt, damit das Servo nicht die ganze Zeit gegen die Schließung fährt (was natürlich bei jedem Servo, sei es auch mit einem Motor aus eitel Engelshaar und einem fein ziselierten Einhornelfenbeingehäuse gesegnet, auf Dauer für Bauchgrimmen sorgt).